为工程师充电 为小企业加油
| |

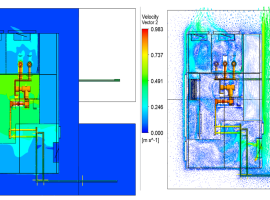 应对800V平台挑战:高压连接器热管理
一、800V平台技术优势与连接器新挑战1.1 技术优势新能源汽车800V高压平台通过提升系统
应对800V平台挑战:高压连接器热管理
一、800V平台技术优势与连接器新挑战1.1 技术优势新能源汽车800V高压平台通过提升系统
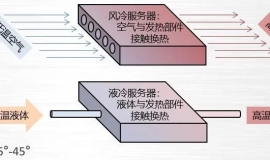
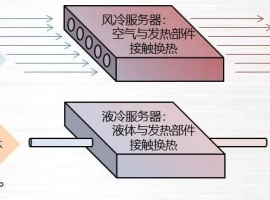 电池热管理技术:从风冷到液冷的迭代
在新能源汽车的快速普及与储能系统规模化发展的背景下,电池热管理技术已成为保障系统
电池热管理技术:从风冷到液冷的迭代
在新能源汽车的快速普及与储能系统规模化发展的背景下,电池热管理技术已成为保障系统
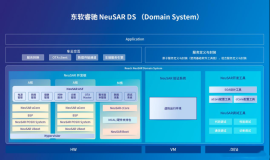
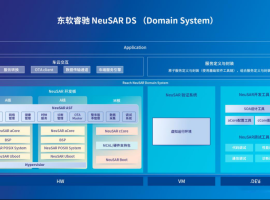 东软睿驰NeuSAR OS:智能汽车时代的
在汽车产业加速向智能化转型的浪潮中,东软睿驰凭借其自主研发的整车智能操作系统NeuS
东软睿驰NeuSAR OS:智能汽车时代的
在汽车产业加速向智能化转型的浪潮中,东软睿驰凭借其自主研发的整车智能操作系统NeuS
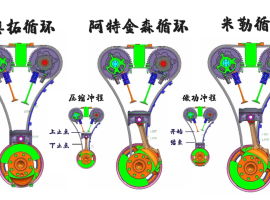 发动机热效率提升技术解析:可变压缩
一、热效率提升的工程意义内燃机作为人类工业革命以来最重要的动力装置,其热效率始终
发动机热效率提升技术解析:可变压缩
一、热效率提升的工程意义内燃机作为人类工业革命以来最重要的动力装置,其热效率始终
 蔚来川藏线换电网络月底贯通:电动车
川藏线(G318国道)作为中国最具挑战性的自驾路线之一,以其壮丽风光与复杂路况吸引着
蔚来川藏线换电网络月底贯通:电动车
川藏线(G318国道)作为中国最具挑战性的自驾路线之一,以其壮丽风光与复杂路况吸引着



 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶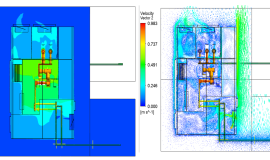
 关注公众号
关注公众号 添加客服微信
添加客服微信